

N'oge na-adịbeghị anya, ụlọ ọrụ anyị na-arụkọ ọrụ ọnụ webatara otu robots nwere ọgụgụ isi, ụdị ígwè ọrụ nwere ọgụgụ isi enyerela anyị aka ịmepụta ngwaahịa dị mma ma melite arụmọrụ na ịdị mma.
The akpaaka na ọgụgụ isi larịị nke ịgbado ọkụ usoro bụ tumadi na-egosipụta na mmepe larịị nke ịgbado ọkụ robot technology.Onye na-arụ ọrụ na-ebugharị nkwonkwo ọ bụla nke robot na akụkụ anọ ma ọ bụ polar nhazi usoro, na-akpali oge ịgbado ọkụ n'okporo ụzọ ịgbado ọkụ, dekọọ ọnọdụ, àgwà oge ịgbado ọkụ, ihe mmegharị na usoro usoro na ụzọ oge ire ere, wee mepụta usoro nkuzi na-aga n'ihu. niile arụmọrụ.
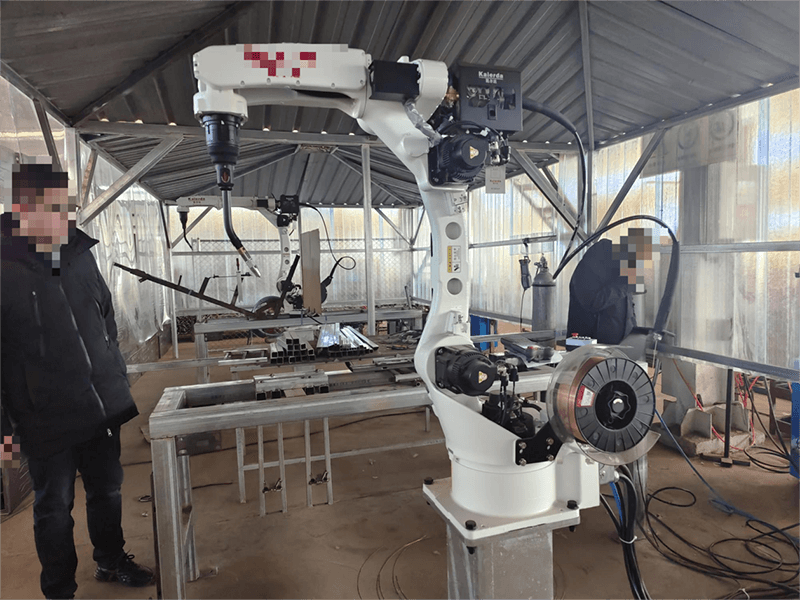
Nke a na ụdị robot enweghị workpiece mgbakọ njehie, thermal deformation na ịgbado ọkụ usoro gburugburu ebe obibi mgbanwe, nakwa dị ka ọrụ ihe mgbanwe kwesịrị ike, ya mere, ịzụlite ọgbọ ọhụrụ nke nwere dịgasị iche iche nke mmetụta ọrụ, nwere ike na-akpaghị aka chepụta trajectory, àgwà oge ịgbado ọkụ na ịgbado ọkụ parameters nke nwere ọgụgụ isi robot ga-abụ isi mmepe direction.
A ga-emepụta mmepe nke ihe ọhụrụ maka ịrụ ọrụ dị elu, arụmọrụ dị elu (gụnyere weldability dị mma) na uru gburugburu ebe obibi.Ịgbado ọkụ ga-emepe usoro ịgbado ọkụ ka mma, mepụta ọkụ ịgbado ọkụ ka mma ma mepụta teknụzụ njikwa kwekọrọ, melite ogo akpaaka ma gbasaa ngwa ngwa nke robot: belata nha nha na nrụzi, belata ọnụ ahịa ịgbado ọkụ, melite mmepụta ahụ. arụmọrụ (dị ka: belata, mgbe preheating, okpomọkụ, zere ịgbado ọkụ overheating, wdg), wepụ echiche nke "ịgbado ọkụ bụ ihe mgbochi n'ichepụta usoro".
Oge nzipu: Jun-18-2024